
深度解析:多工位機(jī)械手如何高效,、安全地完成沖壓作業(yè)
發(fā)布時(shí)間:2024-10-16 14:18:15 瀏覽:37次 責(zé)任編輯:東莞佑億設(shè)備
多工位機(jī)械手的工作原理主要基于其組成部分和操作流程。以下是對其工作原理的詳細(xì)解析:
一,、組成部分
執(zhí)行機(jī)構(gòu):這是機(jī)械手的運(yùn)動(dòng)部分,,主要包括手臂,、手腕和夾具等。這些部件負(fù)責(zé)模擬人類手臂的動(dòng)作,,實(shí)現(xiàn)對工件的精確抓取和放置,。
驅(qū)動(dòng)系統(tǒng):為執(zhí)行機(jī)構(gòu)提供動(dòng)力,通常采用氣壓,、液壓或電動(dòng)等方式,。這些動(dòng)力源能夠確保機(jī)械手在執(zhí)行任務(wù)時(shí)具有足夠的力量和速度。
控制系統(tǒng):負(fù)責(zé)對機(jī)械手的運(yùn)動(dòng)軌跡,、速度和力量進(jìn)行精確控制,。控制系統(tǒng)通常包括硬件和軟件兩部分,,硬件部分如傳感器,、執(zhí)行器等設(shè)備,軟件部分則用于編程和控制機(jī)械手臂的運(yùn)動(dòng)和操作,。
二,、操作流程
抓取工件:在沖壓生產(chǎn)線上,多工位機(jī)械手會(huì)根據(jù)工件的形狀和尺寸,,通過夾具自動(dòng)抓取工件,。
傳送工件:機(jī)械手將抓取到的工件傳送到指定的沖壓工位,。這一過程中,機(jī)械手需要保持工件的穩(wěn)定,,以確保后續(xù)沖壓作業(yè)的質(zhì)量,。
沖壓作業(yè):在沖壓工位上,機(jī)械手會(huì)配合沖壓設(shè)備對工件進(jìn)行沖壓成型,。此時(shí),,機(jī)械手需要保持工件的精確定位,以確保沖壓作業(yè)的準(zhǔn)確性,。
下料與傳送:沖壓完成后,,機(jī)械手將工件從沖壓工位上取下,并傳送到下一個(gè)工位或下道工序,。這一過程中,,機(jī)械手同樣需要保持工件的穩(wěn)定,以避免工件在傳送過程中受到損壞,。
三,、技術(shù)特點(diǎn)
高效性:多工位機(jī)械手可以在短時(shí)間內(nèi)完成大量工件的取料、傳送和定位等操作,,大大提高了生產(chǎn)效率,。
穩(wěn)定性:機(jī)械手采用先進(jìn)的傳動(dòng)方式和精密的機(jī)械結(jié)構(gòu),確保了沖壓作業(yè)的穩(wěn)定性,。即使在長時(shí)間連續(xù)作業(yè)下,,也能保持較高的精度和穩(wěn)定性。
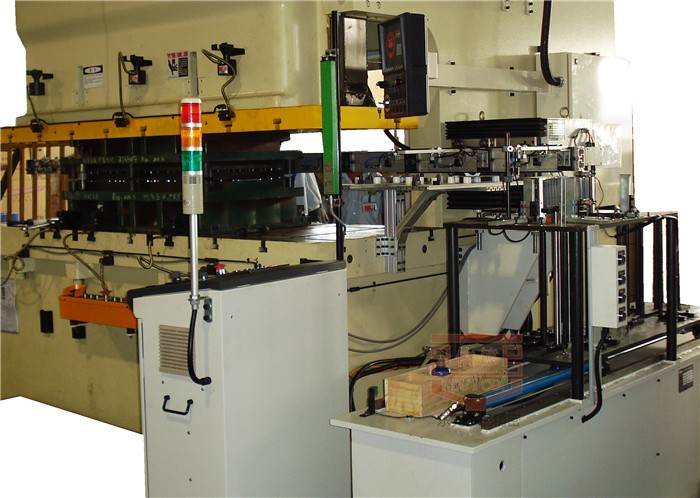
安全性:多工位機(jī)械手通常配備有安全保護(hù)裝置,,如光柵保護(hù),、急停按鈕等,以確保操作人員的安全,。同時(shí),,機(jī)械手的精準(zhǔn)控制也能有效避免產(chǎn)品缺陷和廢品產(chǎn)生。
可編程性:多數(shù)多工位機(jī)械手都配備了可編程控制器,,可以根據(jù)不同的生產(chǎn)需求進(jìn)行編程調(diào)整,。這種靈活性使得機(jī)械手能夠適應(yīng)多種不同的沖壓作業(yè),降低了生產(chǎn)成本,。
綜上所述,,多工位機(jī)械手的工作原理是通過其組成部分的協(xié)同工作,實(shí)現(xiàn)對工件的精確抓取,、傳送,、定位和沖壓等操作。同時(shí),,機(jī)械手的高效性,、穩(wěn)定性,、安全性和可編程性等特點(diǎn)也使其在現(xiàn)代工業(yè)生產(chǎn)中發(fā)揮著越來越重要的作用。
